To get to speed with ROS and Gazebo, I created the Pioneer 3AT robot from mesh files. Learning about simulating the robot’s drive motors was interesting. This code is available in git. Here is a video of the simulation.
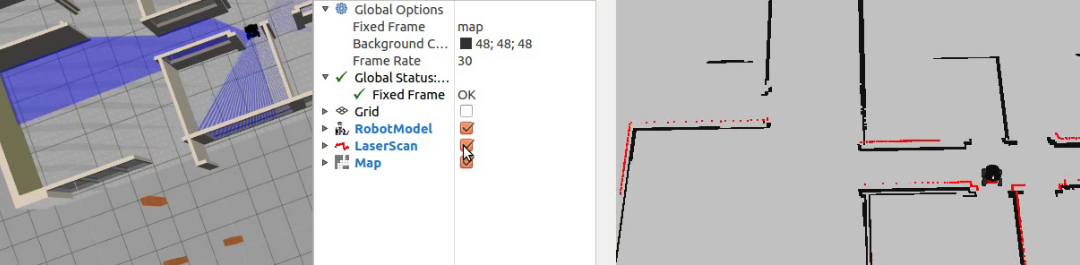
Out of curiosity, I also setup hector slam to generate a map of the environment.