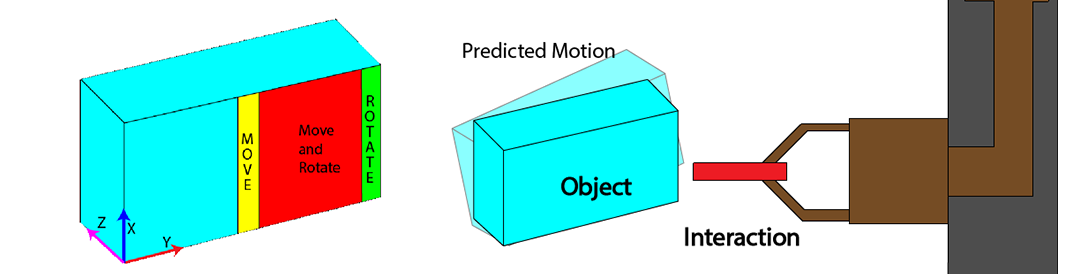
Predicting object motion from push location
Posts
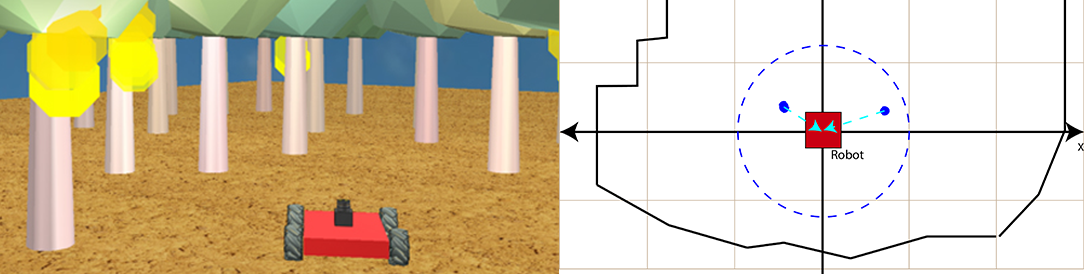
Artificial Potential Field Collision Avoidance for holonomic mobile robots
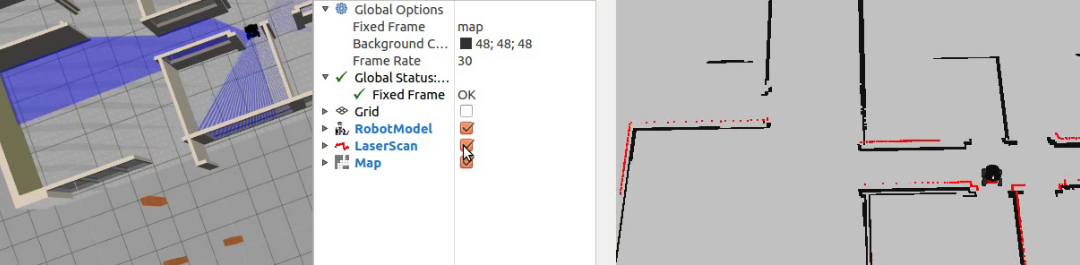
Reactive collision avoidance from a 2D lidar sensor
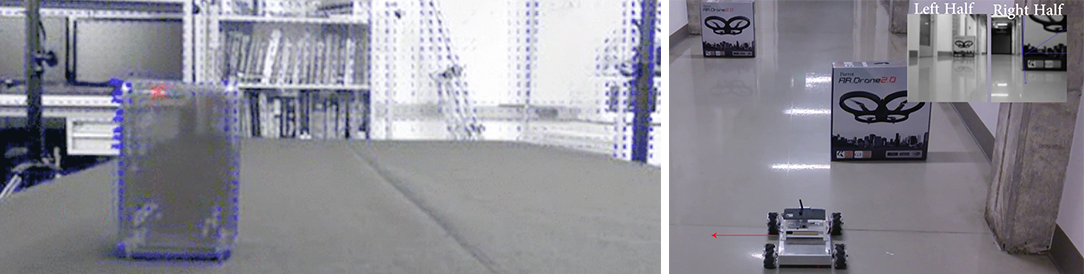
Optic Flow based Collision Avoidance for holonomic mobile robots
Reactive collision avoidance from optic flow with a monocular camera