I am a Senior Research Scientist in the Seattle Robotics Lab at NVIDIA Research with Prof. Dieter Fox. My research interests are in enabling robots to fluidly navigate and interact in unstructured environments while sharing the space with humans. My work involves combining perception, machine learning, numerical optimization, control theory, and robot software-hardware interfaces.
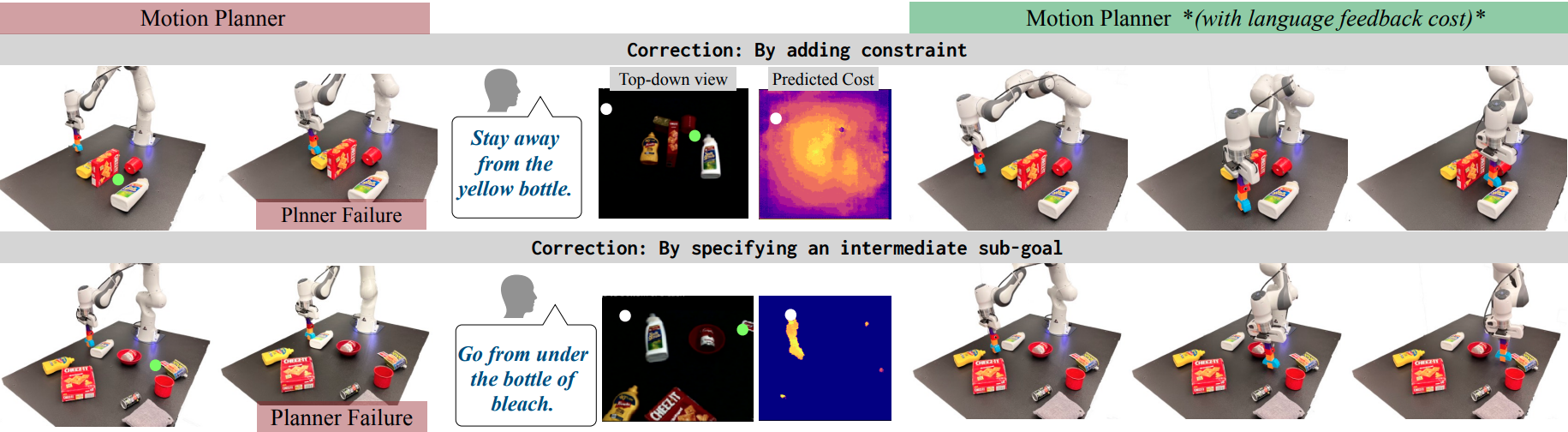
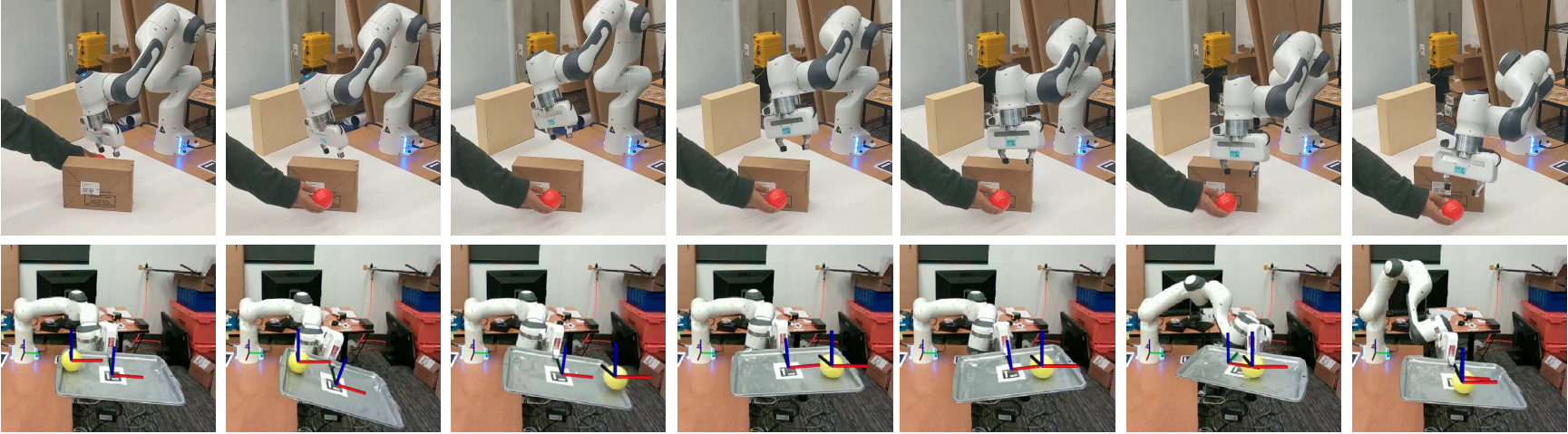
Some of my recent research efforts explore the application of sampling based optimization for reactive manipulator control. We developed a framework (STORM) that enables optimization over non-differentiable cost terms leveraging MPPI, a sampling based optimization technique. Our framework has enabled robots to reactively avoid obstacles (CoRL 2021), move around humans to grasp objects (ICRA 2022), and also correct it’s behavior based on human language feedback (RSS 2022).
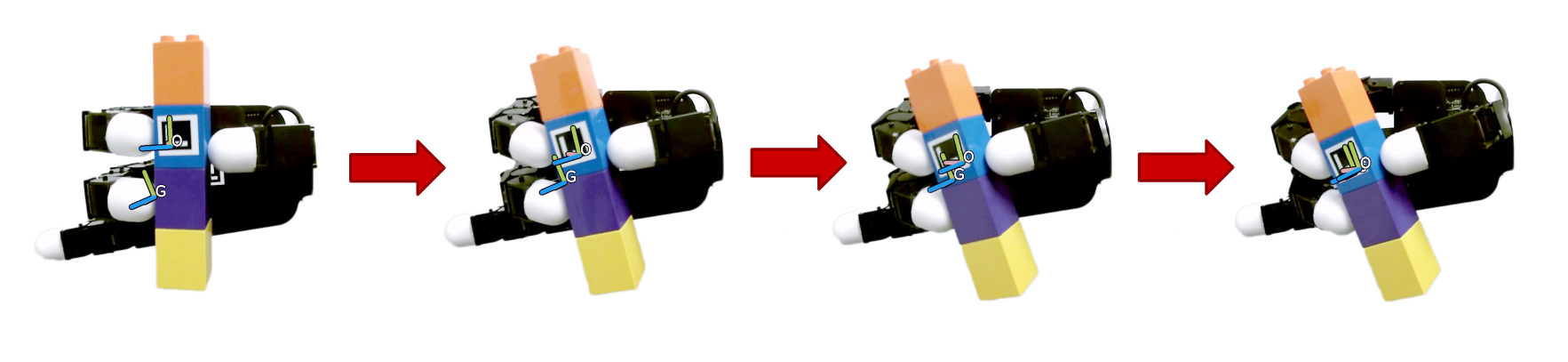
I received my Ph.D. in Computing (Robotics) from the University of Utah under the supervision of Prof. Tucker Hermans. My Ph.D. research focused on planning and tactile perception for in-hand manipulation leveraging trajectory optimization, learned models, and structured inference. In the past, I have worked on mobile robots, specifically on mapping with LIDAR and reactive collision avoidance. I have also built robotic systems ranging from mobile robots to dexterous manipulation systems.
Contact me via linkedin
| Authors | Article Title | Year | Venue |
|---|
| P. Sharma, B. Sundaralingam, V. Blukis, C. Paxton, T. Hermans, A. Torralba, J. Andreas, D. Fox | Correcting Robot Plans with Natural Language Feedback
Website arXiv |
2022 | Proceedings of Robotics: Science and Systems |
| I. Huang, Y. Narang, C. Eppner, B. Sundaralingam, M. Macklin, R. Bajcsy, T. Hermans, D. Fox | DefGraspSim: Physics-based simulation of grasp outcomes for 3D deformable objects
arXiv |
2022 | IEEE Robotics and Automation Letters |
| K. Van Wyk, M. Xie, A. Li, M. Rana, B. Babich, B. Peele, Q. Wan, I. Akinola, B. Sundaralingam, D. Fox, B. Boots, N. Ratliff | Geometric Fabrics: Generalizing Classical Mechanics to Capture the Physics of Behavior
arXiv |
2022 | IEEE Robotics and Automation Letters |
| Y. Chao, C. Paxton, Y. Xiang, W. Yang, B. Sundaralingam, T. Chen, A. Murali, M. Cakmak, D. Fox | HandoverSim: A Simulation Framework and Benchmark for Human-to-Robot Object Ha2ndovers
PDF Video Website arXiv |
2022 | IEEE Intl. Conf. on Robotics and Automation |
| A. Bobu, C. Paxton, W. Yang, B. Sundaralingam, Y. Chao, M. Cakmak, D. Fox | Learning Perceptual Concepts by Bootstrapping from Human Queries
Video Website arXiv |
2022 | IEEE Robotics and Automation Letters |
| W. Yang, B. Sundaralingam*, C. Paxton, I. Akinola, Y. Chao, M. Cakmak, D. Fox | Model Predictive Control for Fluid Human-to-Robot Handovers(*equal contribution)
Video Website arXiv |
2022 | IEEE Intl. Conf. on Robotics and Automation |
| M. Bhardwaj, B. Sundaralingam, A. Mousavian, N. Ratliff, D. Fox, F. Ramos, B. Boots | STORM: An Integrated Framework for Fast Joint-Space Model-Predictive Control for Reactive Manipulation (Selected for Oral Presentation (6.5% acceptance rate))
PDF Website arXiv |
2022 | Proceedings of the 5th Conference on Robot Learning |
| B. Sundaralingam, T. Hermans | In-Hand Object-Dynamics Inference using Tactile Fingertips
PDF Video arXiv |
2021 | IEEE Transactions on Robotics |
| Y. Narang, B. Sundaralingam, K. Van Wyk, A. Mousavian, D. Fox | Interpreting and predicting tactile signals for the SynTouch BioTac
arXiv |
2021 | The International Journal of Robotics Research |
| V. Kumar, D. Hoeller, B. Sundaralingam, J. Tremblay, S. Birchfield | Joint Space Control via Deep Reinforcement Learning
Video arXiv |
2021 | IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) |
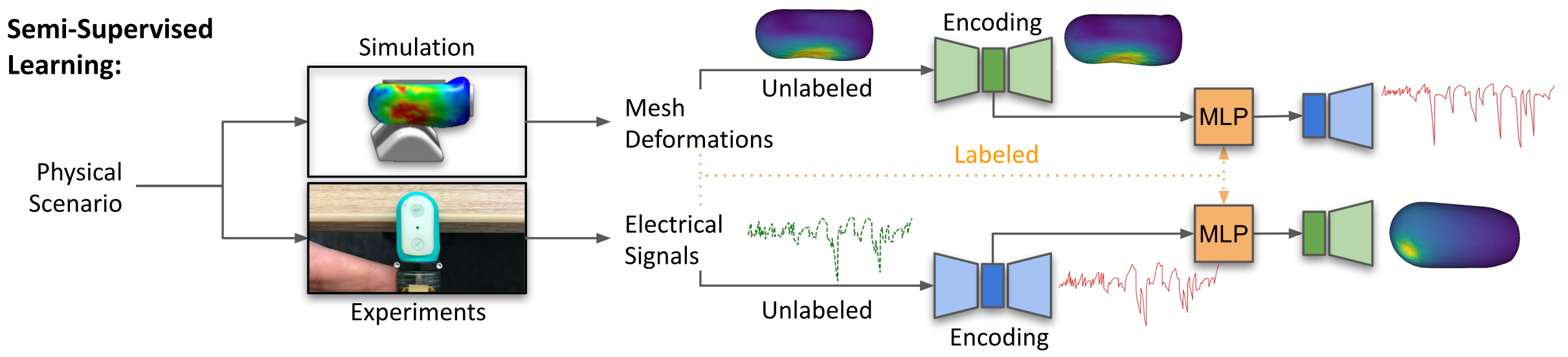
| Y. Narang*, B. Sundaralingam*, M. Macklin, A. Mousavian, D. Fox | Sim-to-Real for Robotic Tactile Sensing via Physics-Based Simulation and Learned Latent Projections (*equal contribution)
Video Website arXiv |
2021 | IEEE Intl. Conf. on Robotics and Automation |
| S. Cruciani*, B. Sundaralingam*, K. Hang, V. Kumar, T. Hermans, D. Kragic | Benchmarking In-Hand Manipulation
PDF Website arXiv |
2020 | IEEE Robotics and Automation Letters (Special Issue: Benchmarking Protocols for Robotic Manipulation) |
| M. Van der Merwe, Q. Lu, B. Sundaralingam, M. Matak, T. Hermans | Learning Continuous 3D Reconstructions for Geometrically Aware Grasping
PDF Website arXiv |
2020 | IEEE International Conference on Robotics and Automation (ICRA) |
| Q. Lu, M. Van der Merwe, B. Sundaralingam, T. Hermans | Multi-Fingered Grasp Planning via Inference in Deep Neural Networks
PDF arXiv |
2020 | IEEE Robotics & Automation Magazine (Special Issue on Deep Learning and Machine Learning in Robotics) |
| B. Sundaralingam, T. Hermans | Relaxed-Rigidity Constraints: Kinematic Trajectory Optimization and Collision Avoidance for In-Grasp Manipulation
PDF Video Website arXiv |
2019 | Autonomous Robots |
| A. Lambert, M. Mukadam, B. Sundaralingam, N. Ratliff, B. Boots, D. Fox. | Joint Inference of Kinematic and Force Trajectories with Visuo-Tactile Sensing
PDF Video arXiv |
2019 | IEEE International Conference on Robotics and Automation (ICRA) |
| G. Sutanto, N. Ratliff, B. Sundaralingam, Y. Chebotar, Z. Su, A. Handa, D. Fox | Learning Latent Space Dynamics for Tactile Servoing
PDF Video arXiv |
2019 | IEEE International Conference on Robotics and Automation (ICRA) |
| B. Sundaralingam, A. Lambert, A. Handa, B. Boots, T. Hermans, S. Birchfield, N. Ratliff, D. Fox | Robust Learning of Tactile Force Estimation through Robot Interaction (Best Manipulation Paper Award Finalist)
PDF Video Website arXiv |
2019 | IEEE International Conference on Robotics and Automation (ICRA) |
| J. Tremblay, T. To, B. Sundaralingam, Y. Xiang, D. Fox, S. Birchfield | Deep Object Pose Estimation for Semantic Robotic Grasping of Household Objects
PDF Website arXiv |
2018 | Conference on Robot Learning (CoRL) |
| B. Sundaralingam, T. Hermans | Geometric In-Hand Regrasp Planning: Alternating Optimization of Finger Gaits and In-Grasp Manipulation
PDF Video |
2018 | IEEE International Conference on Robotics and Automation (ICRA) |
| Q. Lu, K. Chenna, B. Sundaralingam, T. Hermans | Planning Multi-Fingered Grasps as Probabilistic Inference in a Learned Deep Network
PDF Website |
2017 | International Symposium on Robotics Research (ISRR) |
| B. Sundaralingam, T. Hermans | Relaxed-Rigidity Constraints: In-Grasp Manipulation using Purely Kinematic Trajectory Optimization
PDF Video Website |
2017 | Proceedings of Robotics: Science and Systems |