Toggle navigation
About
CV
Publications
Code/Datasets
Blog
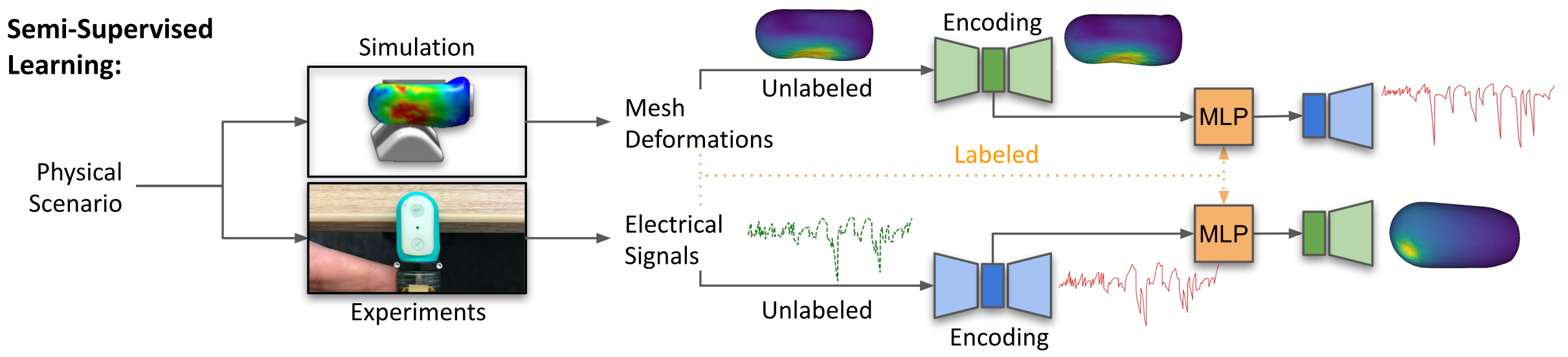
Sim-to-Real for Robotic Tactile Sensing via Physics-Based Simulation and Learned Latent Projections (*equal contribution)
Y. Narang*,
B. Sundaralingam*
, M. Macklin, A. Mousavian, D. Fox
Type
Journal
Publication
IEEE Intl. Conf. on Robotics and Automation
Date
January, 2021
Links
Video
Website
arXiv
Cite
←
Benchmarking In-Hand Manipulation
Joint Space Control via Deep Reinforcement Learning
→
×
Cite