I was a teaching assistant at University of Utah for the following courses:
- ME EN 3230: Mechatronics
CS 6310: Robotics
CS 7320: System Identification for Robotics
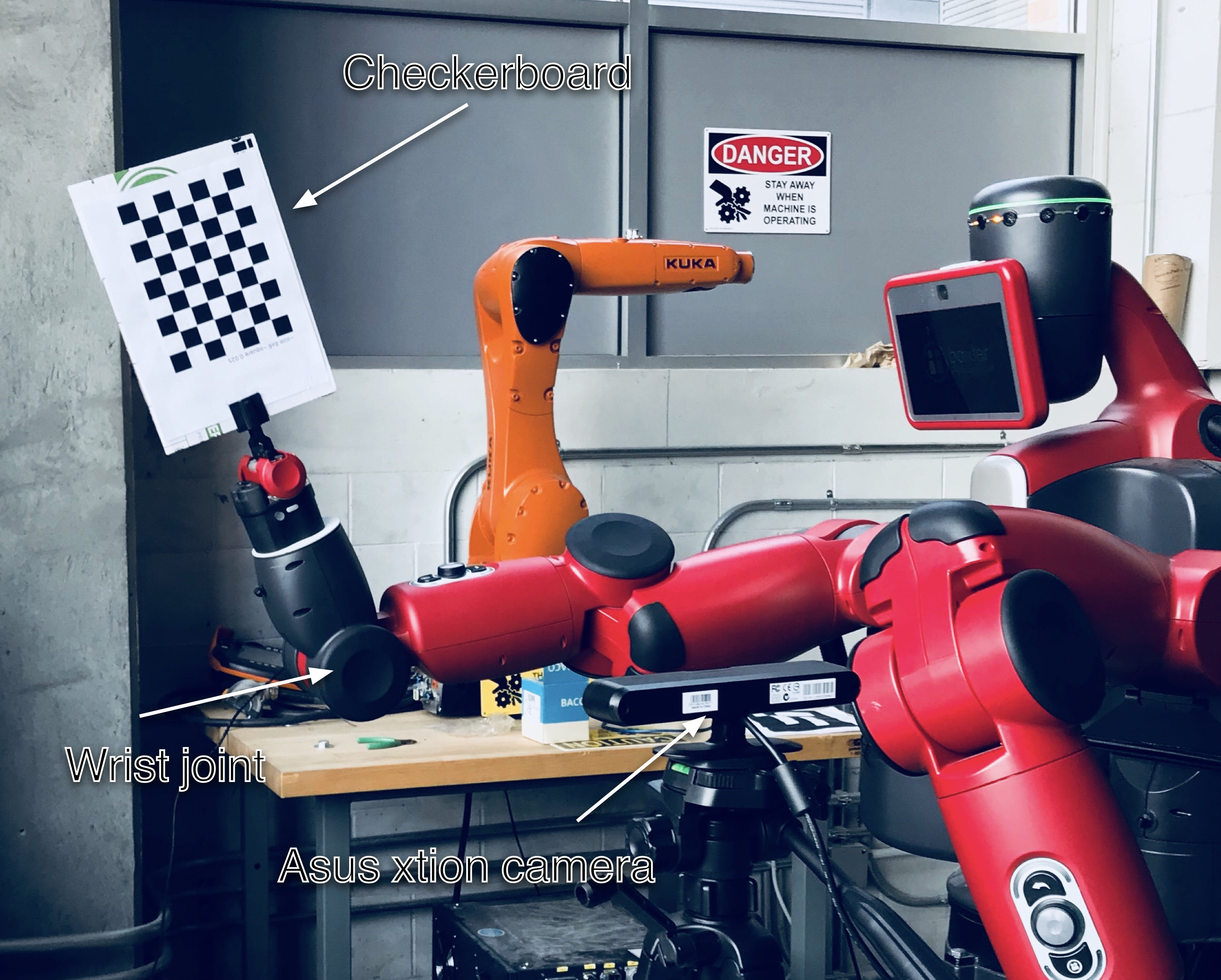
I created labs with the Baxter robot for CS 6310 and CS 7320.

I was a teaching assistant at University of Utah for the following courses:
CS 6310: Robotics
CS 7320: System Identification for Robotics
I created labs with the Baxter robot for CS 6310 and CS 7320.