In-Hand Object-Dynamics Inference using Tactile Fingertips
Abstract
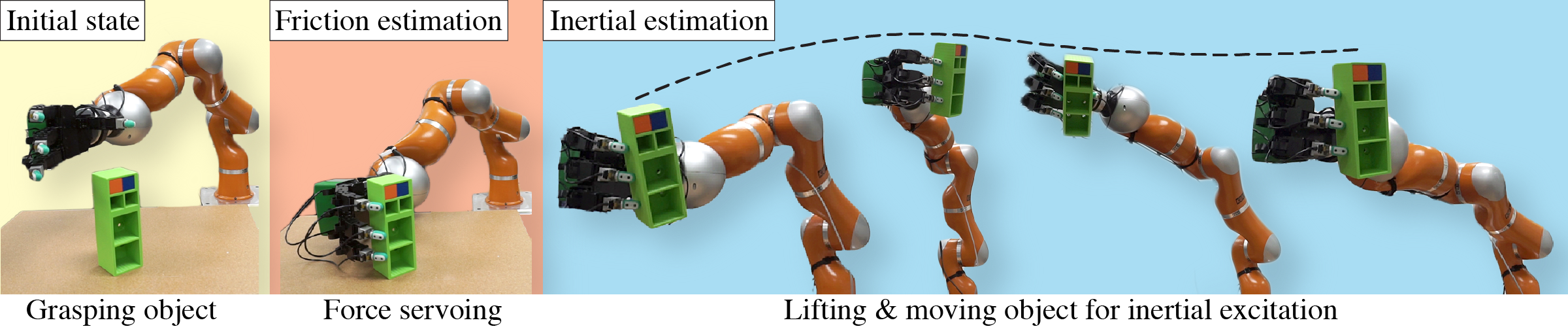
Having the ability to estimate an object’s properties through interaction will enable robots to manipulate novel objects. Object’s dynamics, specifically the friction and inertial parameters have only been estimated in a lab environment with precise and often external sensing. Could we infer an object’s dynamics in the wild with only the robot’s sensors? In this paper, we explore the estimation of dynamics of a grasped object in motion, with tactile force sensing at multiple fingertips. Our estimation approach does not rely on torque sensing to estimate the dynamics. To estimate friction, we develop a control scheme to actively interact with the object until slip is detected. To robustly perform the inertial estimation, we setup a factor graph that fuses all our sensor measurements on physically consistent manifolds and perform inference. We show that tactile fingertips enable in-hand dynamics estimation of low mass objects.