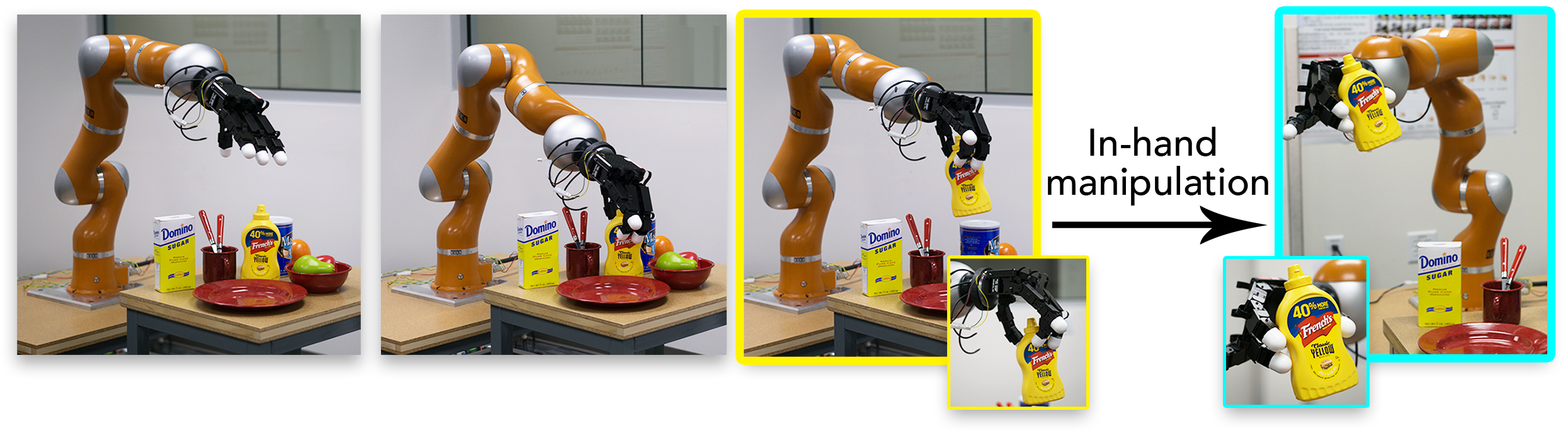
 An example scenario where in-hand manipulation could be leveraged to move to a task specific grasp
An example scenario where in-hand manipulation could be leveraged to move to a task specific grasp
Benchmarking In-Hand Manipulation
Abstract
The purpose of this benchmark is to evaluate the planning and control aspects of robotic in-hand manipulation systems. The goal is to assess the system’s ability to change the pose of a hand-held object by either using the fingers, environment or a combination of both. Given an object surface mesh from the YCB data-set, we provide examples of initial and goal states for various in-hand manipulation tasks. We further propose metrics that measure the error in reaching the goal state from a specific initial state, which, when aggregated across all tasks, also serves as a measure of the system’s in-hand manipulation capability.
Type
Publication
IEEE Robotics and Automation Letters (Special Issue: Benchmarking Protocols for Robotic Manipulation)
Date
January, 2020